The Full Story
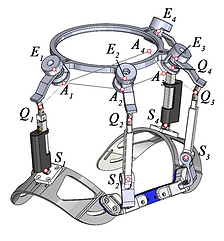
2DOF Neck Brace
This is a design under the lead of professor of Sunil K. Agrawal and phD candidate Priya Kulkarni. The potential application of this design is to assist patients during surgical operation.

Inverse Kinematics
and
Forward Kinematics
The mission of this part is to do the full kinematics analysis towards the 2DOF neck brace. Since it's a 2DOF device, with 2 inputs out of 6 parameters of the end-effector orientation and position provided in IK, the stroke lengths/joint variables can then be determined. Reversely, with 2 stroke lengths/joint variable values provided in FK, the end-effector position and orientation can be determined.
CAD model and Real Fabrication
After conducting analysis of the math model, CAD of the whole mechanism is designed and assembled in SolidWorks. A prototype is being fabricated with the help of CURA 5.0 slicer and Ultimaker 3D printer.

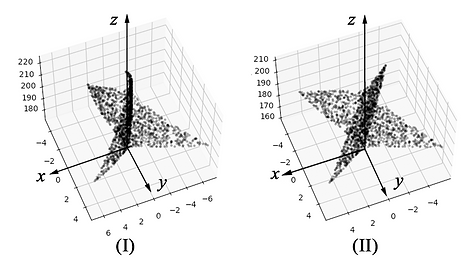
Workspace Analysis
The overall workspace of the current design is 2 intersected curve. When changing the radius of the intermediate plane from 99 mm (in Figure I) to 20 mm (in Figure II), the curve become flatter. And the range of motion for z-translation is 50 mm in total. Besides, the range of motion for lateral bending is -9 degrees to +9 degrees. The figure on the left shows the end-effector position points in 3D space.

Vicon validation Results
The whole validation process is shown in the figure above. Python gui will send the command to Photon. Then the Photon will use the command to control the motor on this neck brace to move to desired position. Then, a Vicon validation towards the end-effector orientaion and position is conducted using Nixus Vicon Softeware. The figure on right shows the results for z-translation and lateral bending.
